Below are a set of projects spanning and overlapping interests in intelligent systems.
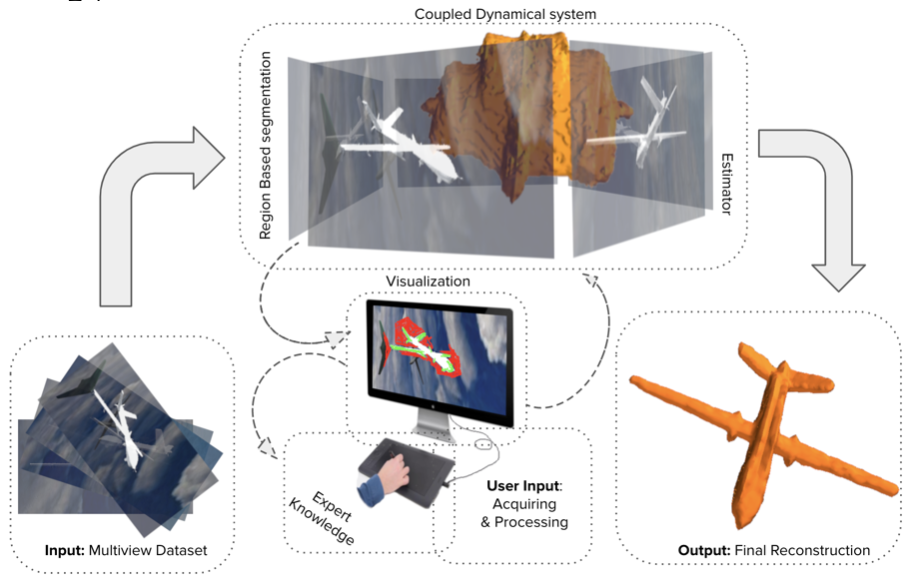
2D3D Image-Based Vision and Model Verification (Human-Machine Hybrid Systems)
This research focuses on developing image-based guidance to make actionable real
world insights such as pose estimation, tracking, avoidance, and attitude determination.
To do so, this project concerns itself in developing passive image-based sensors
that are reliant on underlying areas of geometry, control, and general signal processing. We are particularly
interested in imagery that is low resolution high altitude noisy environments where traditional signal processing (edge)
features are not prevalent. Applications of this research span several areas with a primary focus on autonomous systems.
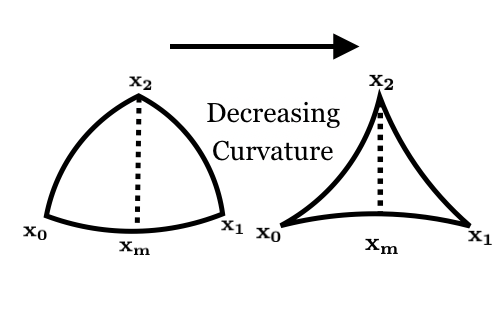
Graph Theory and Multi-Agent Geometric Aspects in Learning
This research focus on graph theory and machine learning with a particular interest in computational and network geometry with
connections to dynamical systems. This includes varying discrete mathematics and discretizations over general metric spaces.
Recent interests are focus on discrete geometry (namely, curvature) along with connections to Wasserstein geometry, entropy,
and spectral graph theory. With no targeted application, we are interested in developing an understanding of network
functionality not only “2D” graphs, but those of hypergraphs and multi-graphs as well as areas of distributed reinforcement learning over networks.
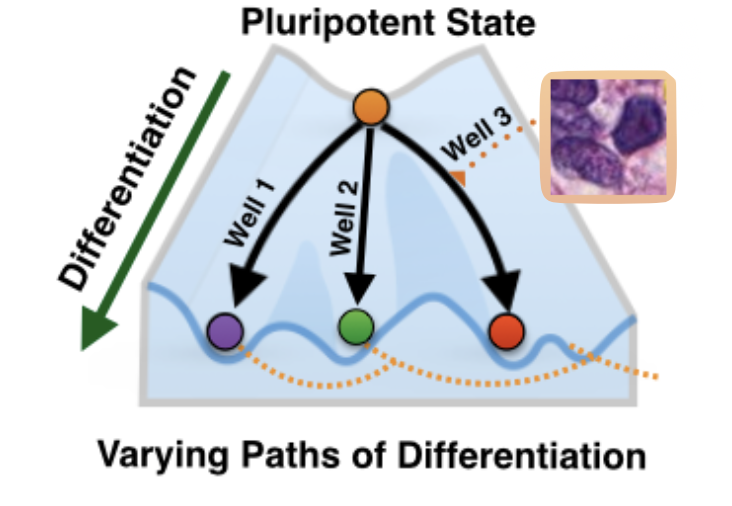
Systems Biology & Mathematical Oncology
This research focuses on notion of robustness, heterogeneity, cellular organization,
and phase changes which are ubiquitous concepts that are of significance in order to
understand dynamical biological systems. In particular, feedback loops are essential
to the function of biological mechanisms and systems that arise from deliberate
Darwinian-like principles. This leads one to heterogeneity of cellular population.
Here, we are interested in developing underlying biological theory and
fundamental “laws” of cancer.